隨著水路運輸業的快速發展,現代港口規模和吞吐量不斷增長,港口各種裝卸設備數量不斷增加,如何高效可靠使用這些裝卸設備是各港口單位關心的問題。港口裝卸設備中主要的斗輪堆取料機又稱懸臂式堆取料機,是散貨堆場作業的核心設備。它是堆取料合一的機械,即是一種挖取和堆存煤炭、礦石、砂石等松散物料的高效率機械。它不僅適用于電廠,而且在碼頭、港口也很適用,大多數的轉運煤及松散物料的碼頭、港口都采用斗輪堆取料機。斗輪堆取料機的采用,大大縮短了堆取時間,提高了工作效率,減輕了工人勞動強度。
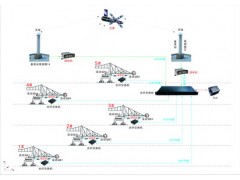
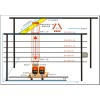
為提高裝卸均化作業的效率和安全問題,應保證堆取料機具備尋堆認址、定位, 自動確定各層料堆起點、終點及位置跟蹤、終點記憶、料流對中心、電纜保護、整機自動堆取料,從而實現流暢和高效的堆取料自動作業。同時中控室能夠對作業過程進行監視。所以有必要對堆取料機大機位置進行連續跟蹤、懸臂三維位置實時檢測,解決堆取料作業過程中空間防碰撞的難題。
系統實現功能效果
使用本系統后,進行數據采集和空間幾何算法,再將計算結果傳給PLC,進行大機精確位置檢測和防碰撞控制的計算與報警,還可以檢測懸臂旋轉角度及俯仰角度,效果顯著。不但解決了其它位移傳感器檢測大機位置不準確的問題,而且節省了檢測懸臂旋轉角度及俯仰角度的傳感器,消除了數據檢測中間轉換的誤差,提高了數據精準度。同時,計算過程簡單、直觀,可實現多臺堆取料機同場同時作業,實時檢測各個懸臂之間的最小距離,防止發生碰撞,提高了安全性和作業效率,可用于多種類型的堆取料機,提高同場作業效率達到80%左右,可以實現無人操作。
* 堆取料機走行位置、裝卸位置精確檢測;
* 可實現堆取料機自動走行,自動堆取料;
* 實現位置聯鎖,可以防止兩端掉道或碰撞事故;
* 與堆取料機小皮帶聯鎖控制,防止混料、錯料、堵料事故;
* 可進行鱗狀堆積預混勻作業,以提高原料成分的均勻度、減少粒度偏析;
* 實現堆取料機遠程監控功能;
* 結合皮帶秤數據對堆場堆存量數字化管理;
* 嚴格控制堆料形狀和取料規律,可以大大提高料場的存儲容量,提高料場的利用率;
* 變起點定終點工藝可將料堆截面堆成長方形,減少端部料的產生和浪費,也同時減少鏟車進場的作業量。